10.5.4 Nested Exceptions and Stack Overflow
Nested exceptions refer to the ability for higher priority exceptions to preempt the processing of lower priority exceptions. Much like a context switch for tasks when a higher priority one becomes ready, the lower priority exception is preempted, which allows the higher priority ESR to execute. When the higher priority service routine is complete, the earlier running service routine returns to execution. Figure 10.6 illustrates this process.
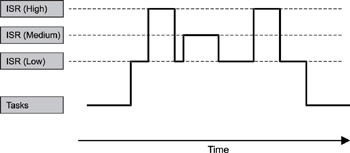
Figure 10.6: Interrupt nesting.
The task block in the diagram in this example shows a group of tasks executing. A low-priority interrupt then becomes active, and the associated service routine comes into context. While this service routine is running, a high-priority interrupt becomes active, and the lower priority service routine is preempted. The high-priority service routine runs to completion, and control returns to the low-priority service routine. Before the low-priority service routine completes, another interrupt becomes active. As before, the low-priority service routine is preempted to allow the medium-priority service routine to complete. Again, before the low-priority routine can finish, another high-priority interrupt becomes active and runs to completion. The low-priority service routine is finally able to run to completion. At that point, the previously running task can resume execution.
When interrupts can nest, the application stack must be large enough to accommodate the maximum requirements for the application's own nested function invocation, as well as the maximum exception or interrupt nesting possible, if the application executes with interrupts enabled. This issue is exactly where the effects of interrupt nesting on the application stack are most commonly observed.
As exemplified in Figure 10.4, N tasks have been created, each with its own TCB and statically allocated stack. Assuming the stack of the executing task is used for exceptions, a sample scenario, as shown in Figure 10.7, might look as follows:
1. Task 2 is currently running.
2. A low-priority interrupt is received.
3. Task 2 is preempted while exception processing starts for a low-priority interrupt.
4. The stack grows to handle exception processing storage needs.
5. A medium-priority interrupt is received before exception processing is complete.
6. The stack grows again to handle medium-priority interrupt processing storage requirements.
7. A high-priority interrupt is received before execution processing of the medium interrupt is complete.
8. The stack grows to handle high-priority interrupt processing storage needs.
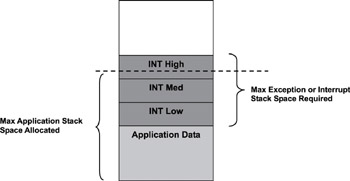
Figure 10.7: Nested interrupts and stack overflow.
In each case of exception processing, the size of the stack grows as has been discussed. Note that without a MMU, no bounds checking is performed when using a stack as a storage medium. As depicted in this example, the sum of the application stack space requirement and the exception stack space requirement is less than the actual stack space allocated by Task 2. Consequently, when data is copied onto the stack past the statically defined limits in this example, Task 3's TCB is corrupted, which is a stack overflow. Unfortunately, the corrupted TCB is not likely to be noticed until Task 3 is scheduled to run. These types of errors can be very hard to detect. They are a function of the combination of the running task and the exact frequency, timing, and sequence of interrupts or exceptions presented to the operating environment. This situation often gives a user or testing team the sense of a sporadic or flaky system. Sometimes, dependably recreating errors is almost impossible.
Two solutions to the problem are available: increasing the application's stack size to accommodate all possibilities and the deepest levels of exception and interrupt nesting, or having the ESR or ISR switch to its own exception stack, called an exception frame.
The maximum exception stack size is a direct function of the number of exceptions, the number of external devices connected to each distinct IRQ line, and the priority levels supported by the PIC. The simple solution is having the application allocate a large enough stack space to accommodate the worst case, which is if the lowest priority exception handler executes and is preempted by all higher priority exceptions or interrupts. A better approach, however, is using an independent exception frame inside the ESR or the ISR. This approach requires far less total memory than increasing every task stack by the necessary amount.